
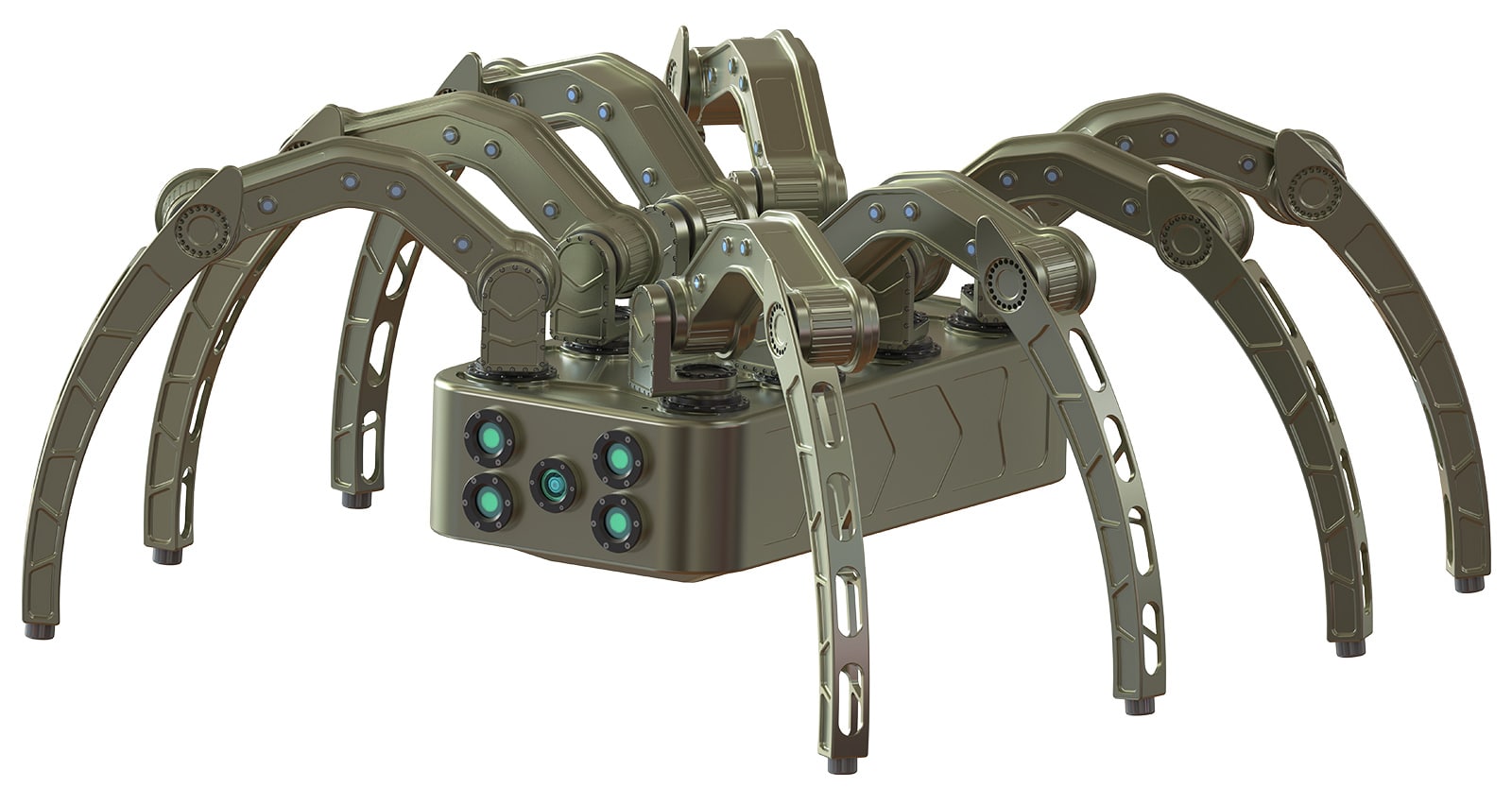
Des robots biomimétiques, dotés de pattes adaptables capables de franchir des obstacles ou de s’adapter aux surfaces accidentées
Face aux défis posés par des terrains complexes et accidentés, tels que ceux rencontrés après un tremblement de terre ou des pentes abruptes de plus de 45°, l’innovation robotique cherche à égaler la flexibilité et l’agilité des animaux.
Actuellement, aucun robot n’est capable de s’adapter de manière aussi souple à ces environnements difficiles. Inspiré par l’étude approfondie des mouvements agiles et évolués des animaux, j’ai entrepris le développement de robots biomimétiques, dotés de pattes adaptables capables de franchir des obstacles ou de s’adapter aux surfaces accidentées.
Biomimétisme : Apprendre des Animaux
L’étude approfondie des animaux a été la source principale d’inspiration. En observant comment les animaux évoluent, s’adaptent, et utilisent leur agilité dans des environnements variés, j’ai cherché à appliquer ces principes à la conception de robots. Les pattes des animaux, en particulier, offrent un modèle fascinant pour la mobilité dans des environnements difficiles.
Adaptabilité aux Obstacles et aux Surfaces Complexes
La clé de l’innovation réside dans la conception de pattes robotiques qui peuvent s’adapter entre les obstacles ou s’ajuster à des surfaces irrégulières. Les articulations flexibles et les capteurs intelligents sont intégrés pour permettre une adaptation en temps réel aux obstacles rencontrés, permettant ainsi aux robots de naviguer efficacement sur des terrains accidentés.
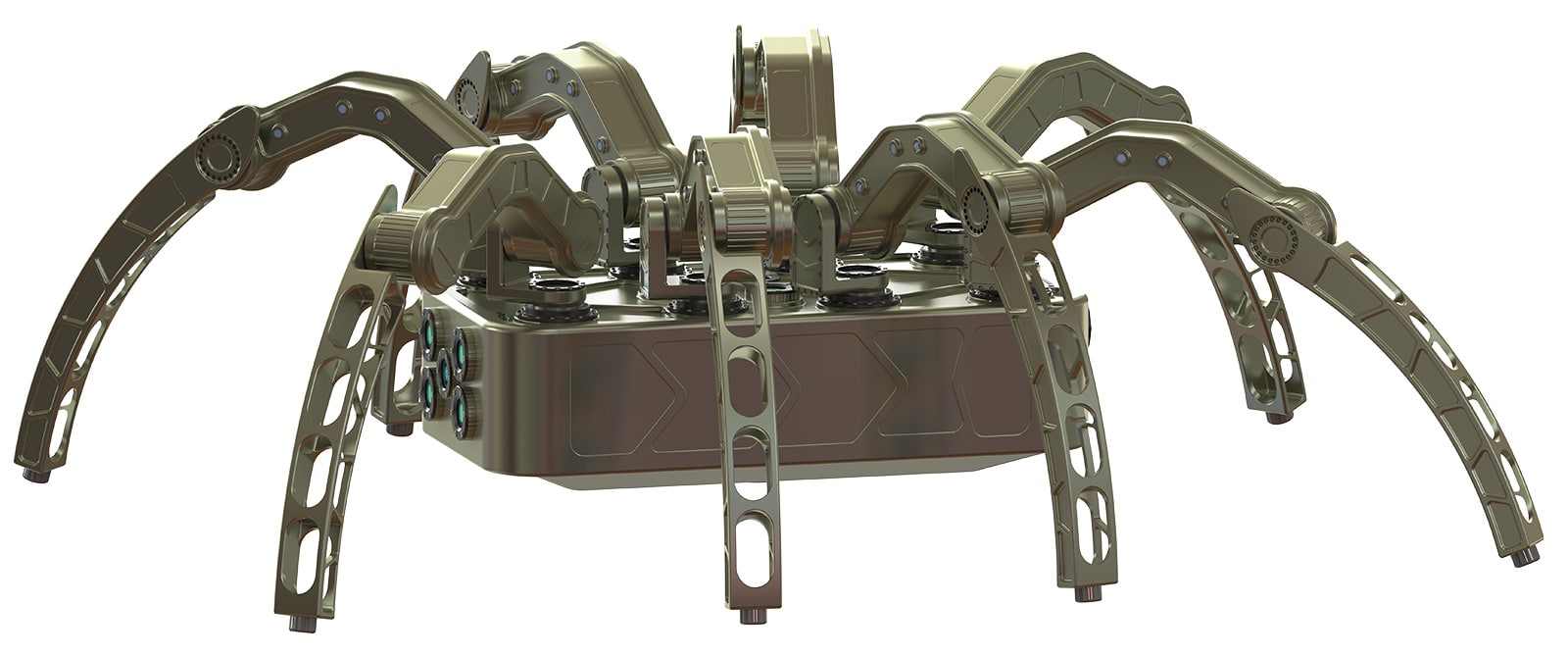
Corps avec Centre de Gravité Variable
Pour assurer une stabilité optimale, le concept de corps robotique a évolué vers un modèle avec un centre de gravité variable sur trois axes. Ce changement permet une adaptabilité accrue aux pentes extrêmes et aux terrains instables. Le robot peut ajuster son centre de gravité en fonction des conditions du terrain, améliorant ainsi sa stabilité et sa mobilité.
Mouvements Complexes et Évolués
En s’inspirant des mouvements complexes des animaux, les robots biomimétiques intègrent des algorithmes avancés de contrôle de mouvement. Ces algorithmes permettent des mouvements souples et naturels, offrant une agilité exceptionnelle dans des environnements complexes. Les robots peuvent ainsi exécuter des tâches variées, de la traversée de terrains accidentés à l’évitement d’obstacles imprévus.
Applications Potentielles
Les robots biomimétiques conçus pour évoluer dans des terrains complexes ont des applications potentielles diverses, allant des opérations de secours après des catastrophes naturelles à l’exploration de terrains difficiles. Leur adaptabilité exceptionnelle les rend également utiles dans des domaines tels que l’inspection de sites industriels ou la surveillance de zones inaccessibles.
L’innovation biomimétique dans le domaine de la robotique ouvre de nouvelles perspectives passionnantes. En s’inspirant des animaux et en imitant leur agilité, les robots adaptatifs pour les terrains complexes représentent une avancée significative dans la recherche de solutions efficaces pour des environnements difficiles. Ces développements prometteurs pourraient transformer la manière dont nous abordons les situations d’urgence et les défis environnementaux dans le futur.
Il est fascinant de constater comment ma passion pour les animaux, en particulier les requins, influence non seulement ma fascination personnelle, mais également le choix de noms pour mes robots. Chacun de ces noms évoque des images spécifiques liées aux caractéristiques et aux comportements des animaux auxquels ils sont associés. Cette approche donne à mes robots une identité distinctive et renforce le lien entre la nature, la technologie et l’innovation.
Voici une brève description de chacun des noms que j’ai choisis :
Scarab, Puma, Aracnyd, Scorpio, Reptyl, Barakuda, Argyros, Rhyno, Arius, Atrax, Viper, Cayman, Orca, Vixen, Frelon, Hedgehog, Boa.
Chacun de ces noms évoque une essence animale distincte, offrant non seulement une identité mémorable à vos robots, mais aussi une indication subtile de leurs caractéristiques et capacités. Cette approche créative dans le choix de noms ajoute une couche supplémentaire d’attrait à mes créations robotiques


